高端裝備制造
一種事件觸發(fā)-神經(jīng)動(dòng)態(tài)規(guī)劃的機(jī)械臂分散跟蹤控制方法
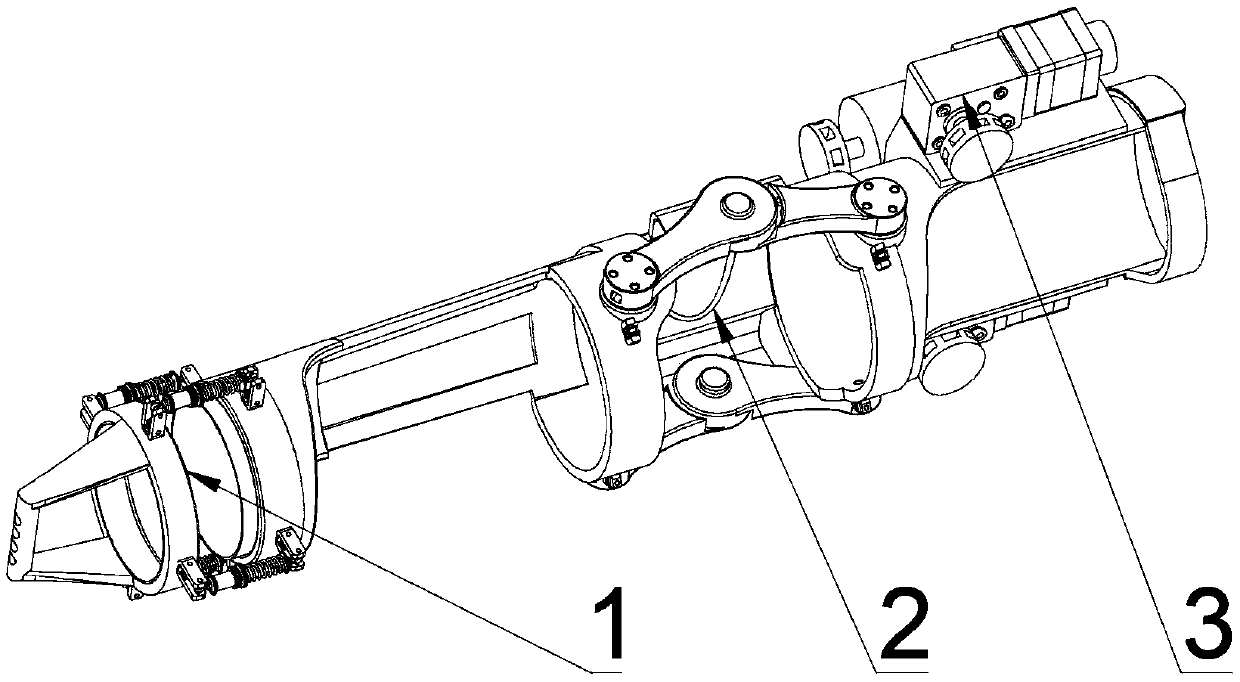
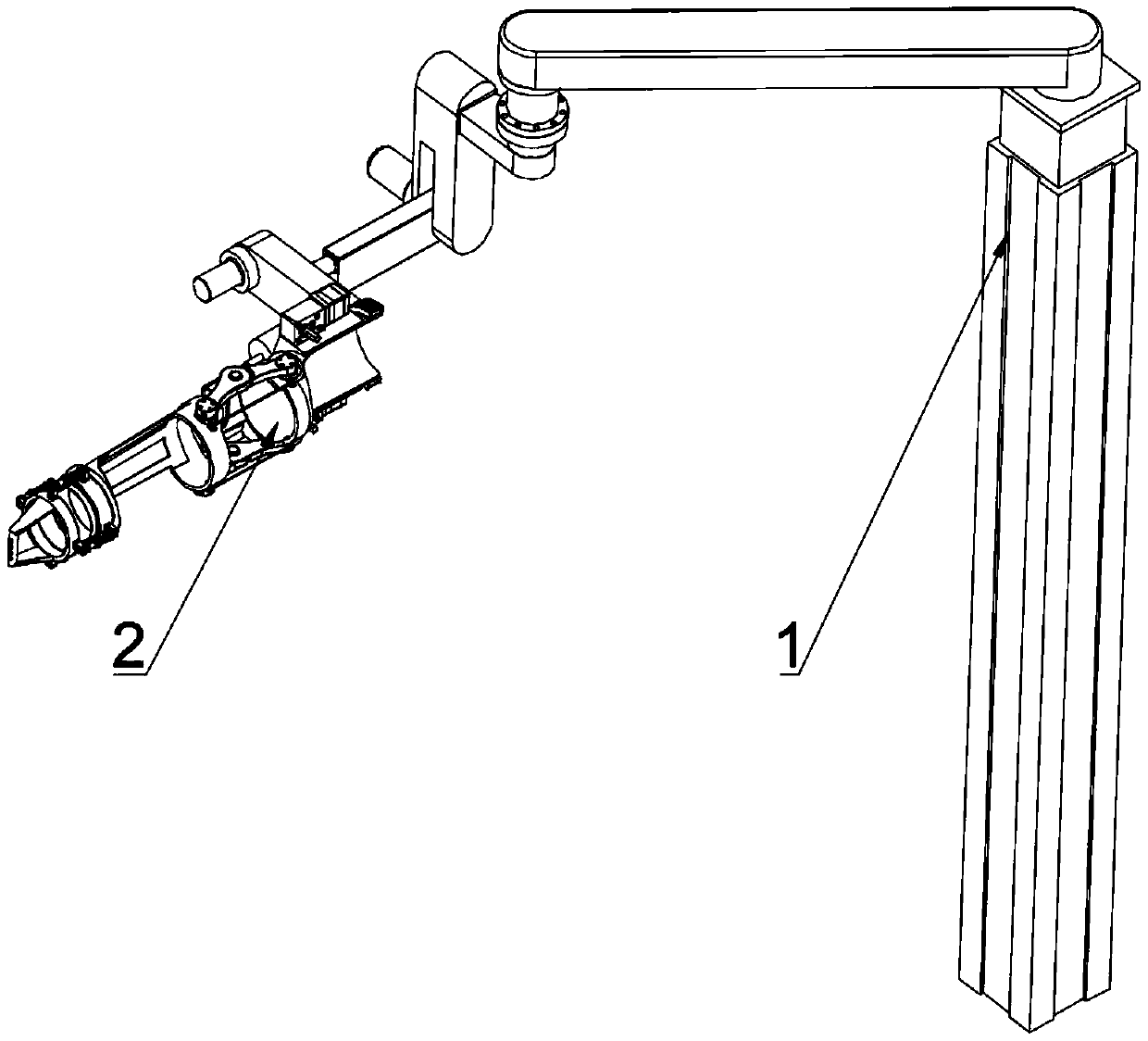
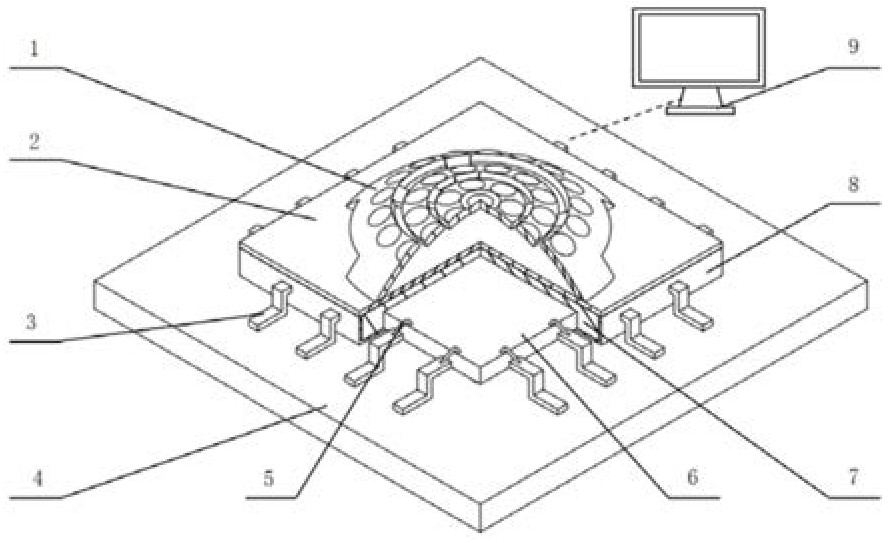
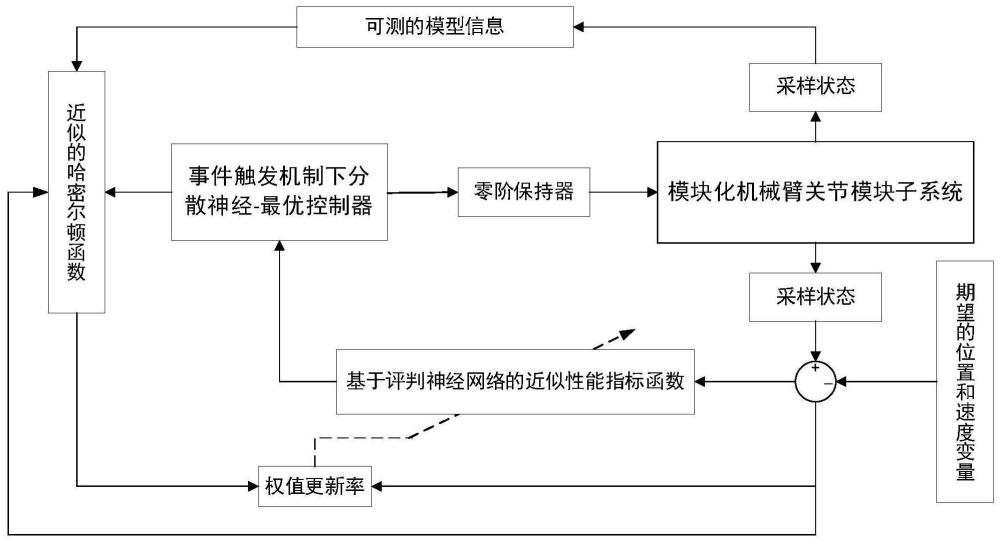
一種事件觸發(fā)?神經(jīng)動(dòng)態(tài)規(guī)劃的機(jī)械臂分散跟蹤控制方法,該方法為:構(gòu)建基于關(guān)節(jié)力矩反饋技術(shù)的模塊化機(jī)械臂子系統(tǒng)動(dòng)力學(xué)模型��,通過設(shè)計(jì)綜合跟蹤性能�����、控制器輸出和近似模型項(xiàng)的改進(jìn)代價(jià)函數(shù)����,引入事件觸發(fā)機(jī)制��,當(dāng)且僅當(dāng)滿足觸發(fā)條件時(shí)對(duì)系統(tǒng)控制律進(jìn)行更新�����,利用評(píng)價(jià)神經(jīng)網(wǎng)絡(luò)近似求解基于事件觸發(fā)機(jī)制的哈密爾頓方程�����,最終得到基于事件觸發(fā)機(jī)制的模塊化機(jī)械臂關(guān)節(jié)模塊子系統(tǒng)神經(jīng)?最優(yōu)跟蹤控制策略���,保證機(jī)械臂系統(tǒng)在與外界環(huán)境接觸時(shí)安全穩(wěn)定地運(yùn)行。
長(zhǎng)春工業(yè)大學(xué)
授權(quán)發(fā)明